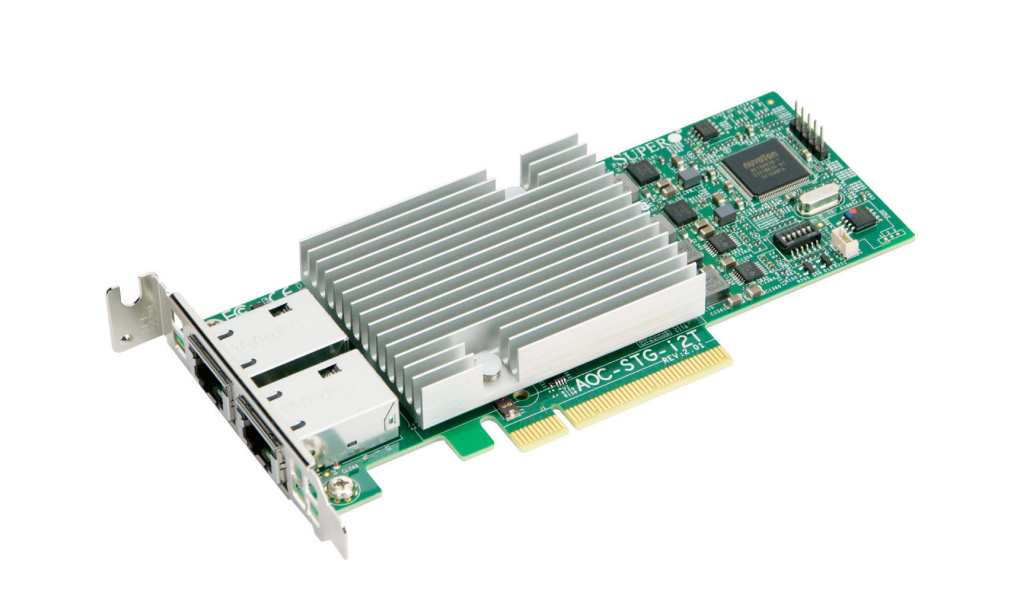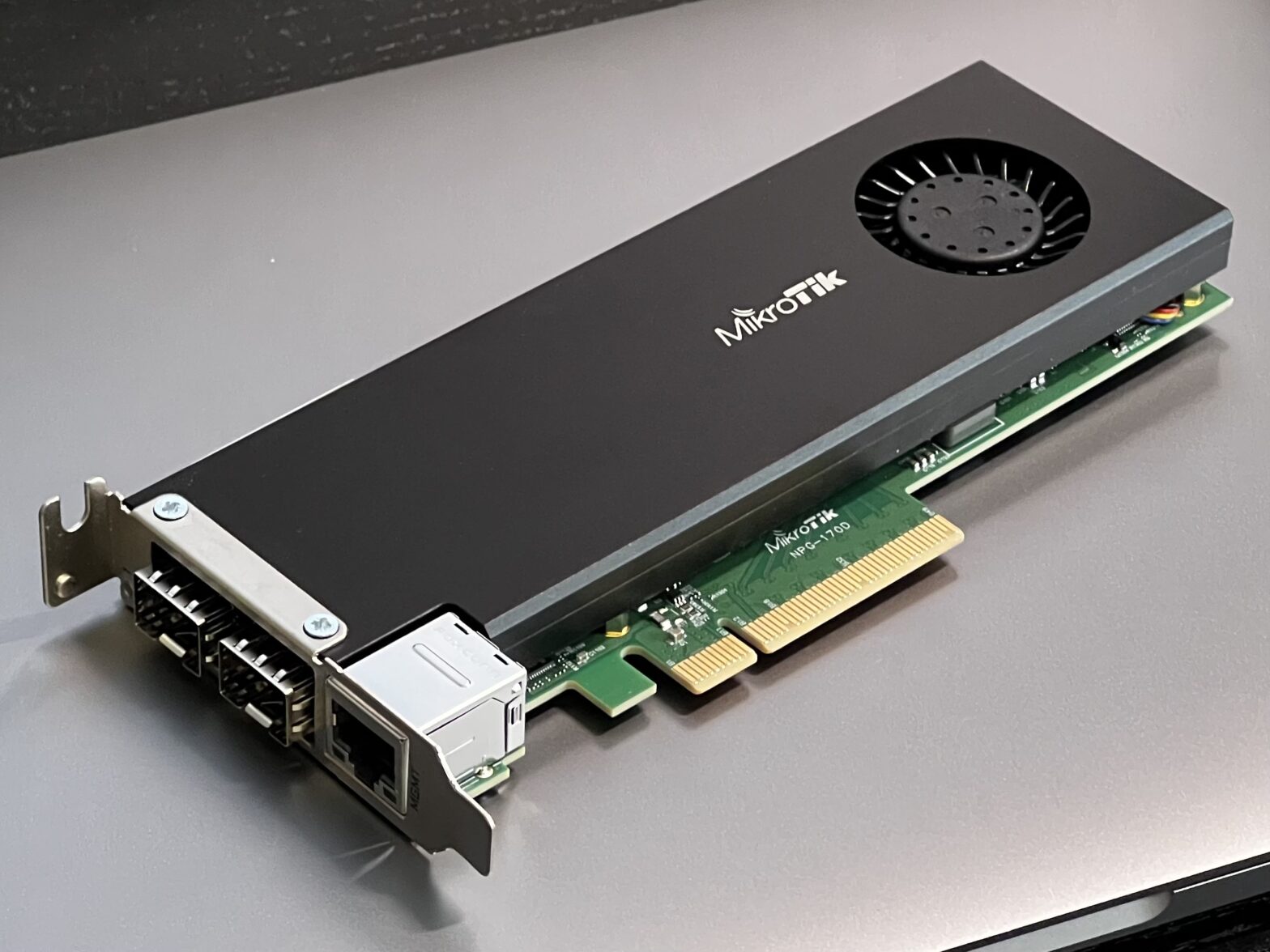
CCR2004-1G-2XS-PCIe时Mikrotik在2022年初发布的“网卡形态的路由器”,是一个网卡+路由器二合一的产品。
关于CCR2004-1G-2XS-PCIe的CPU型号,Mikrotik的宣传手册上写的是AL32400,这与其他CCR2004系列路由器上的型号一致。但官网产品页面中写的却是AL52400,让人困惑,RouterOS中也没显示其CPU型号。
这周正好我订的那个也到货了,直接拆开一探究竟,发现确实是AL32400,后缀1700,应该表示1.7GHz频率版本,与其他CCR2004系列路由器一致,同样这个CPU也被用在了QNAP的一款NAS上。其内核规格为4核A57(ARM Cortex-A57 1.7GHz x4),A57是A72的上一代架构,与A53、A55不同,A57是同属于A7x系列的高性能核,因此可以认为AL32400的CPU性能与树莓派4的BCM2711较为类似,后者为4核A72,1.5GHz或1.8GHz(新版arm_boost),对于路由器而言性能比较不错。
下面为详细的拆解图(点击图片查看原始尺寸)
说是拆解,但其实这就是一个PCIe卡,拆下PCIe档片后,在拧下背面的5个螺丝拆下散热器,即可露出全貌:

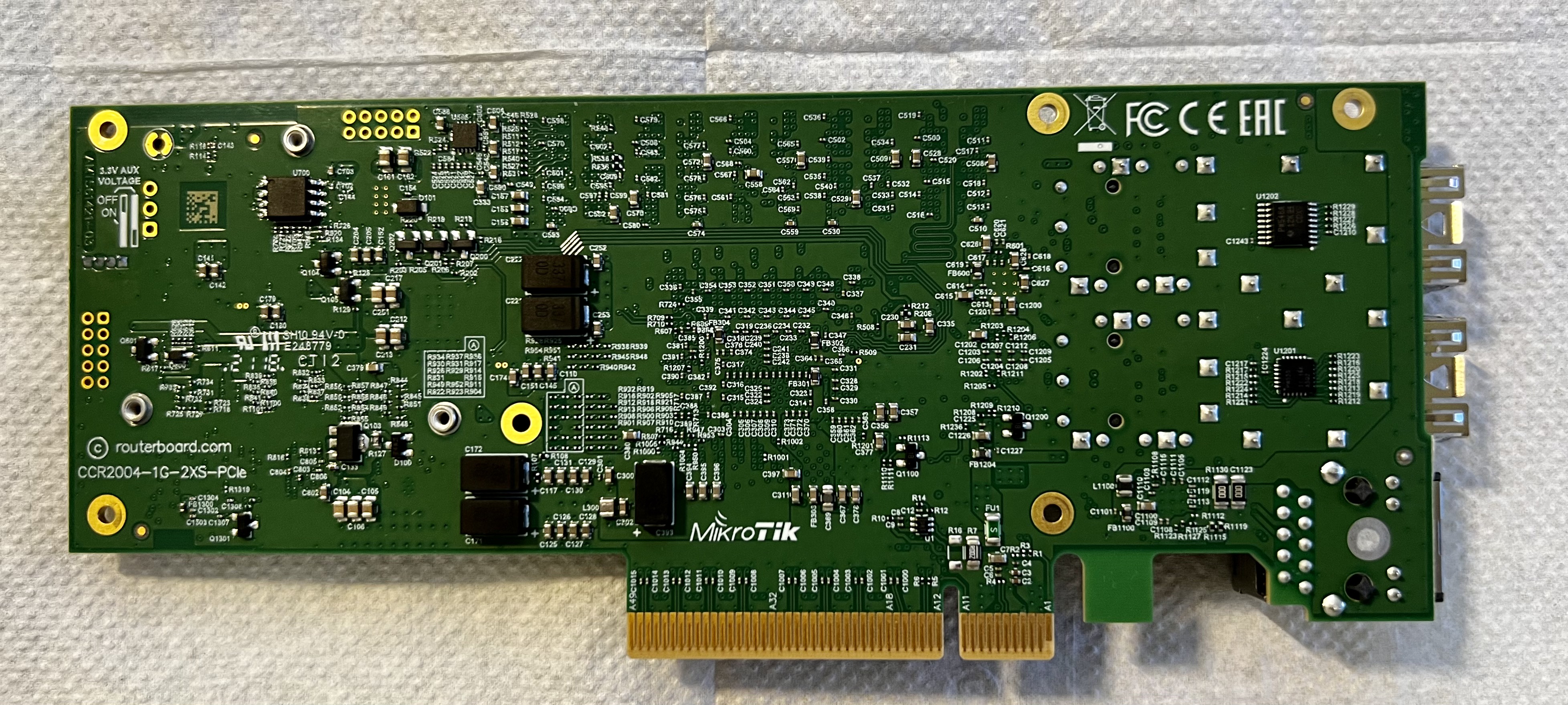
背面:
CPU,或者说SOC,型号AL32400(-1700):

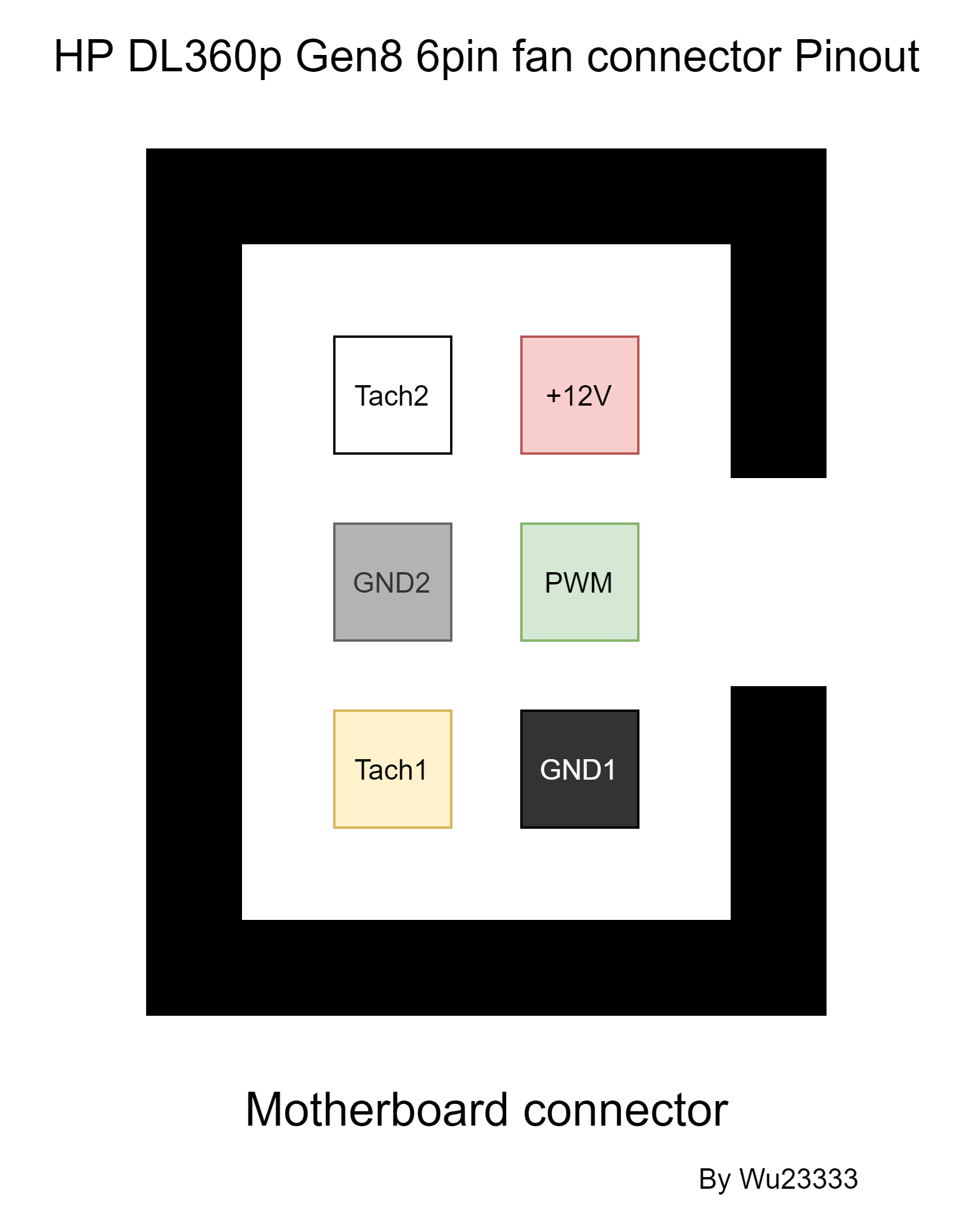
拆掉散热风扇,其规格为12v 0.13A 4线,直径44mm,孔距39mm,厚度约1cm:

PCB全貌:
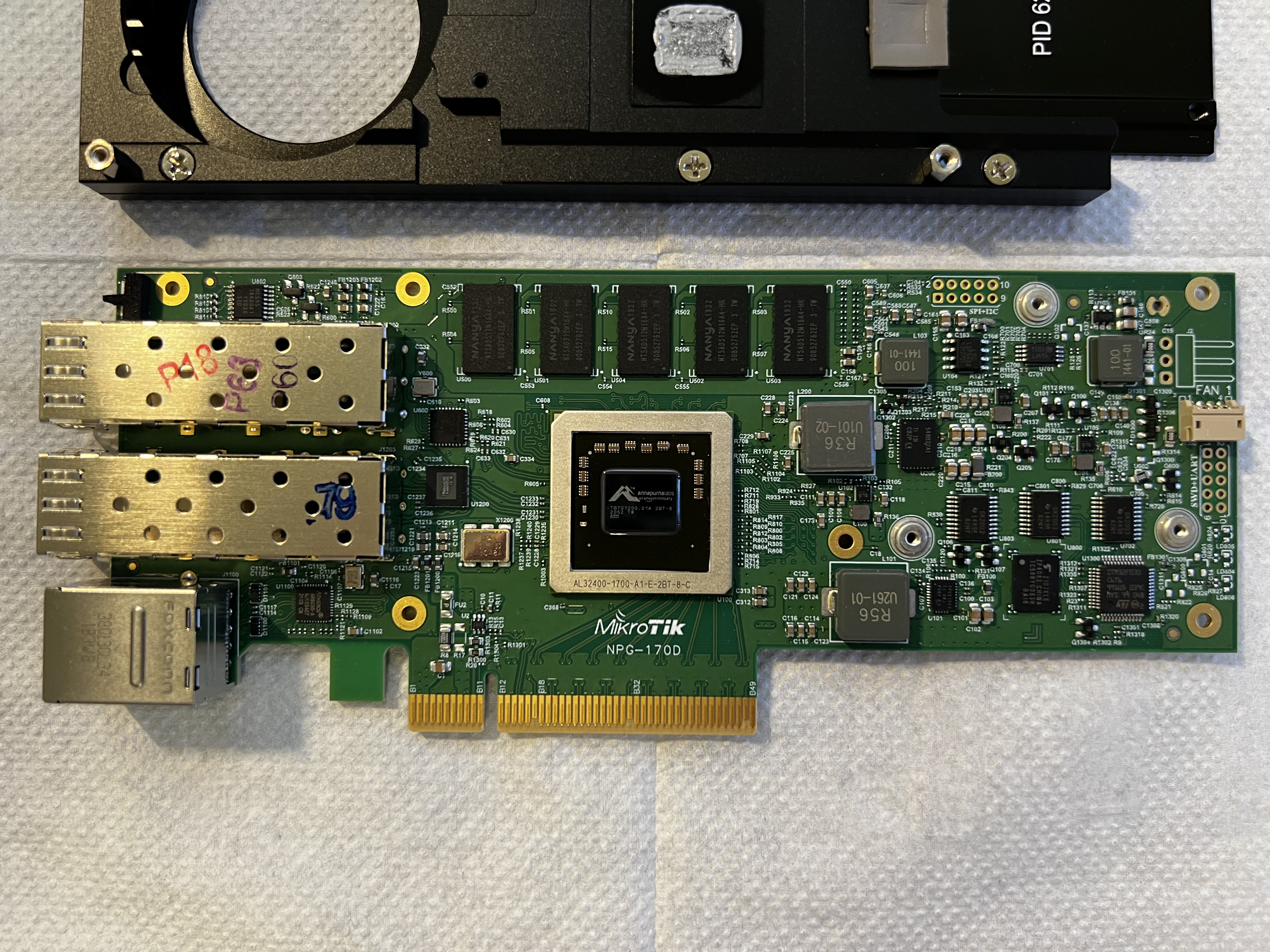
可以看出其布局和普通的高速网卡是非常类似的,不同的是中央的芯片是一个SoC,而不是网卡芯片,并且上方还有其内存,内存大小为4GB,但内存颗粒为5个,可能是有ECC。
关于其实际使用的体验,我会在后续发布新的文章。
其他附属芯片
SoC左侧,SFP28接口周围

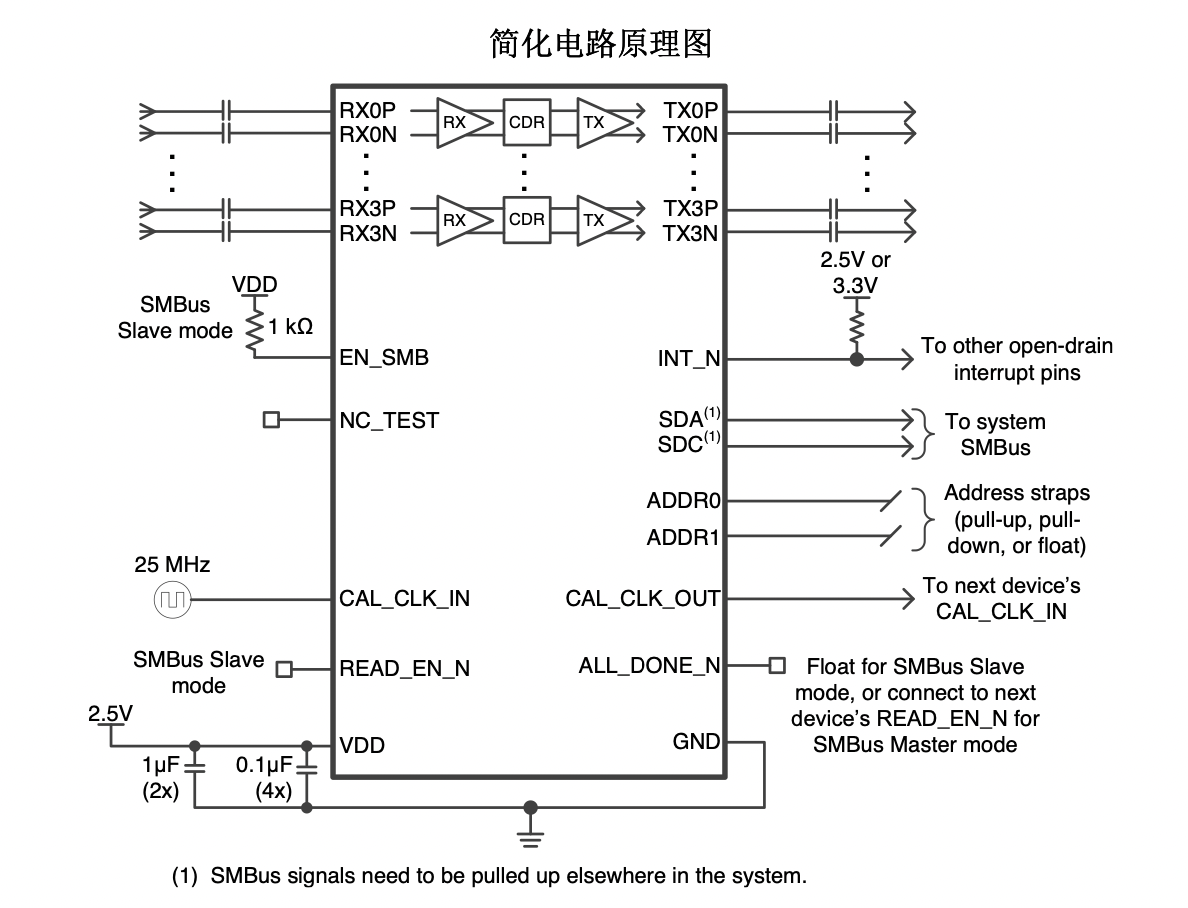
红色:德州仪器TI DS250DF410,25Gbps 多速率 4 通道重定时器,以太网重定时器、转接驱动器和多路复用器缓冲器
具有集成信号调节功能的四通道多速率重定时器,最大速度25.8Gbps,支持协议:IEEE802.3bj, 100GbE, Infiniband EDR, OIF-CEi-25G-LR/MR/SR/VSR, QSFP28, CFP2/CFP4, CDFP
DS250DF410 是一款具有集成信号调节功能的四通道多速率重定时器。该器件用于扩展有损且存在串扰的远距离高速串行链路的延伸长度并提升稳定性,同时实现不高于 10-15 的比特误码率 (BER)。
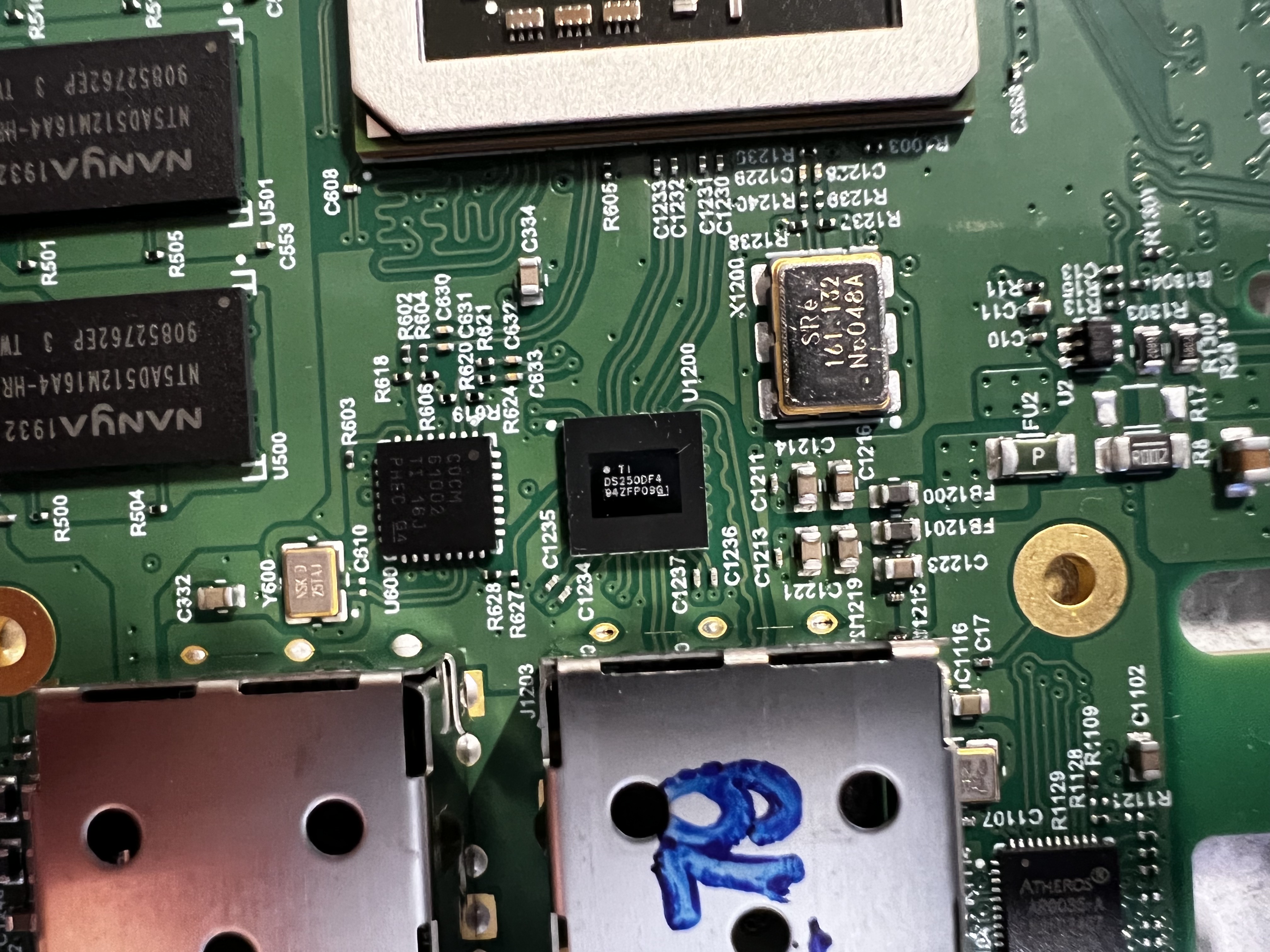
黄色:德州仪器TI CDCM61002,1:2 超低抖动晶振时钟发生器

CDCM61002是一种高度通用的低抖动频率合成器,可以产生两个低抖动时钟输出,可以在低压正发射器耦合逻辑(LVPECL)、低压差分信令(LVDS)或低压互补金属氧化物半导体(LVCMOS)输出之间进行选择,来自低频晶体或LVCMOS输入,用于各种有线和数据通信应用。CDCM61002具有板载PLL,只能通过控制引脚轻松配置。整体输出随机抖动性能小于1ps,RMS(从10 kHz到20 MHz),使该设备成为SONET、以太网、光纤通道和SAN等苛刻应用程序的完美选择。CDCM61002有一个小体积的32pin、5mm×5mm QFN封装可供选择。
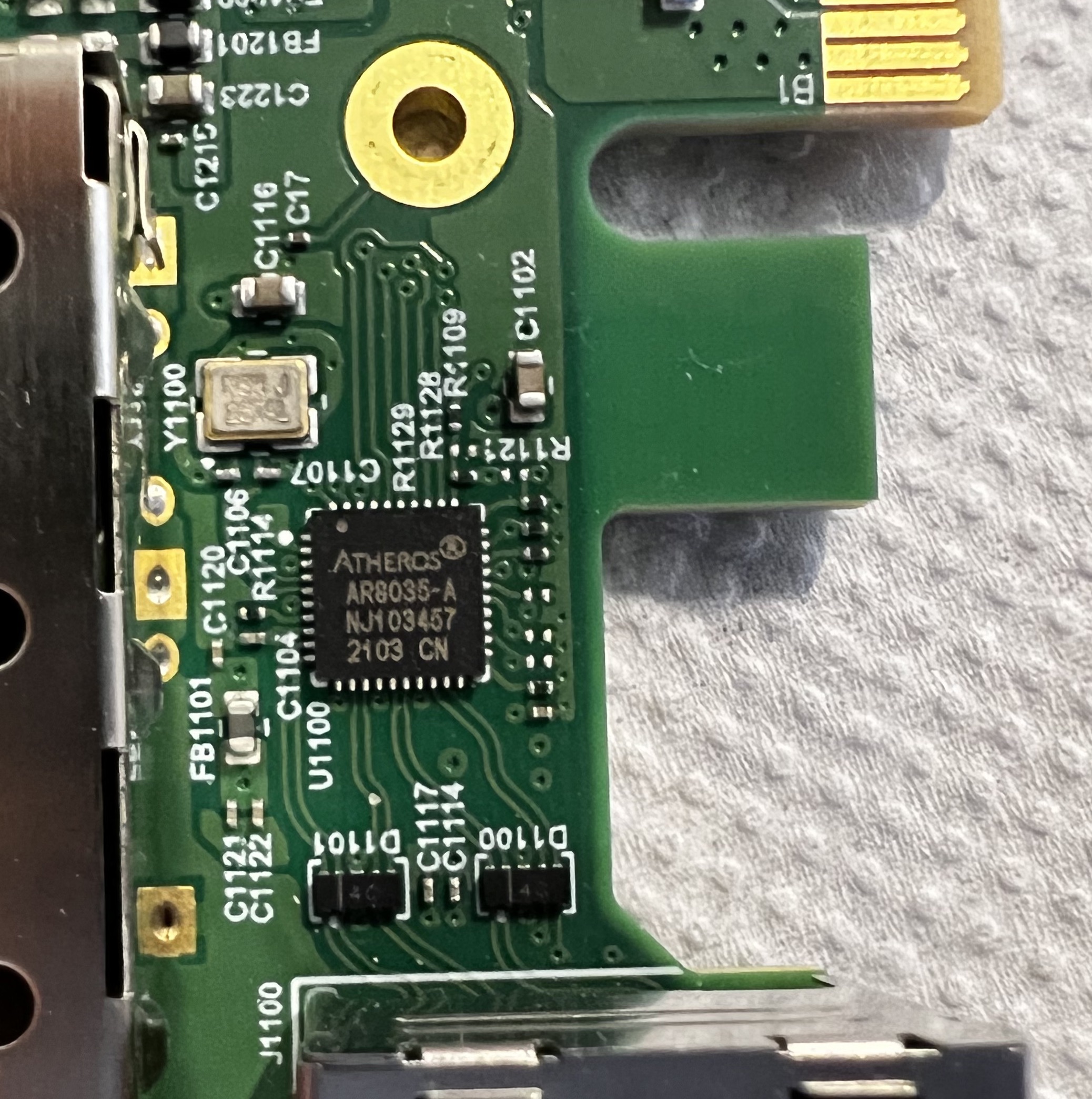
绿色:Atheros AR8035 集成10/100/1000千兆以太网收发器
AR8035是Atheros的第4代 单口 10/100/1000 Mbps Tri-speed Ethernet PHY,支持RGMII接口的MAC。
紫色:74HC595,串行输入、并行输出的8位移位缓存器
蓝色:NT5AD512M16A4-HR,DDR4 8Gb(1GB)内存颗粒,支持速率:2933、2666、2400
SoC右侧
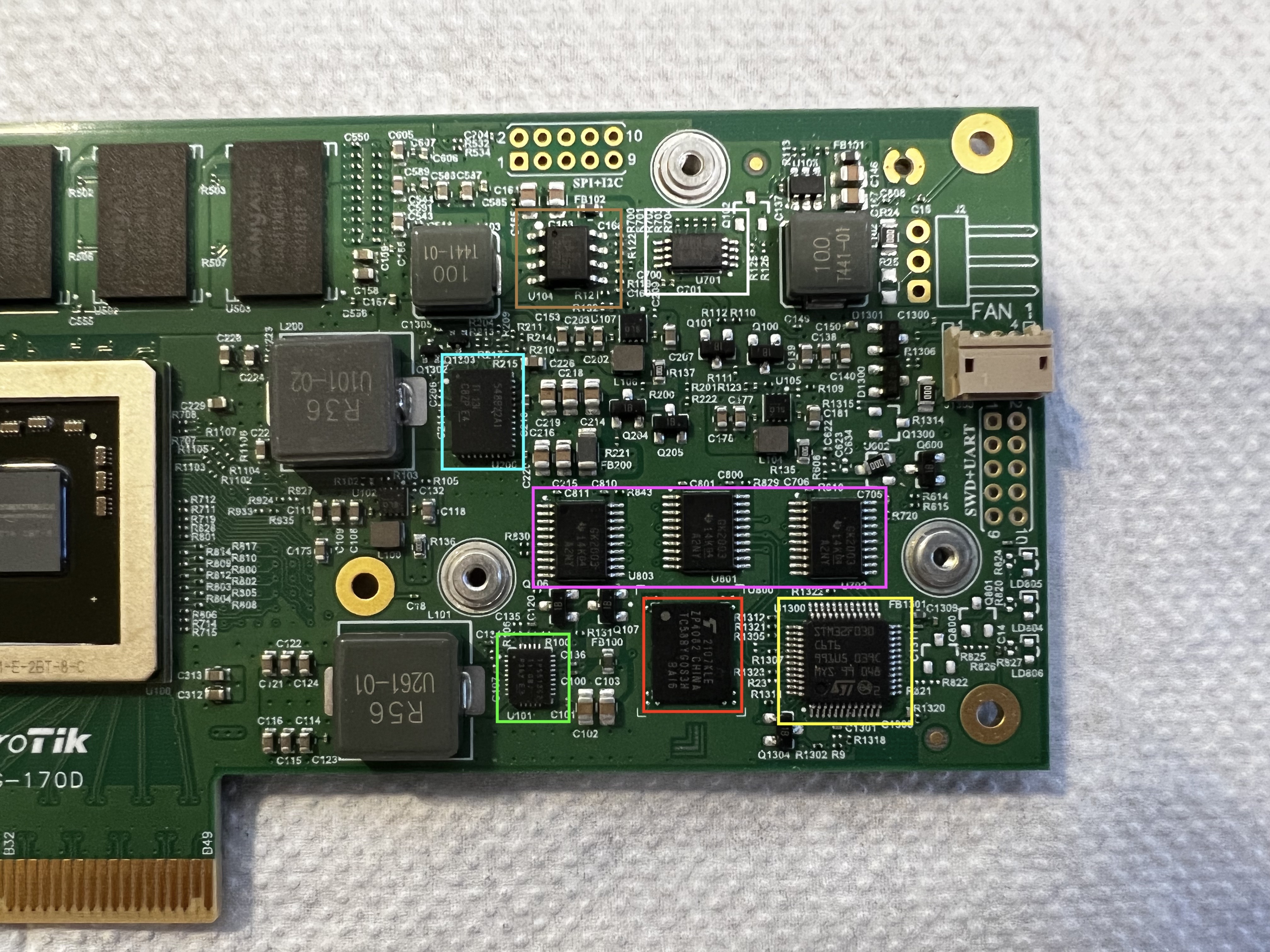
红色:铠侠(原东芝)Kioxia TC58BYG0S3HBAI6,Built-in ECC SLCNAND,1Gb(128MB)SLC NAND 闪存,1.8v,x8位宽
黄色:意法半导体ST STM32F030C6T6,主流ARM Cortex-M0超值系列MCU,具有32 KB Flash和48 MHz CPU
绿色:德州仪器TI TPS51362,具有超低静态电流的 3V 至 22V、10A 同步降压转换器,输入3~22v,输出0.6v ~ 2v
蓝色:德州仪器TI TPS548B22 具有差分遥感功能的 1.5V 至 18V、25A 同步 SWIFT™ 降压转换器,输入1.5~18v,输出0.6v ~ 5.5v
紫色:德州仪器TI SN74GTL2003 (丝印GK2003)3片,双向电平转换器,双向0.95v~5v
棕色:LITE-ON LSP5523,3A 27V 同步降压转换器,输入4.5v~27v,输出0.925v~0.8Vin
白色:意法半导体ST M24C64-F(丝印464FT),64-Kbit(8KB)串行I2C总线EEPROM
背面
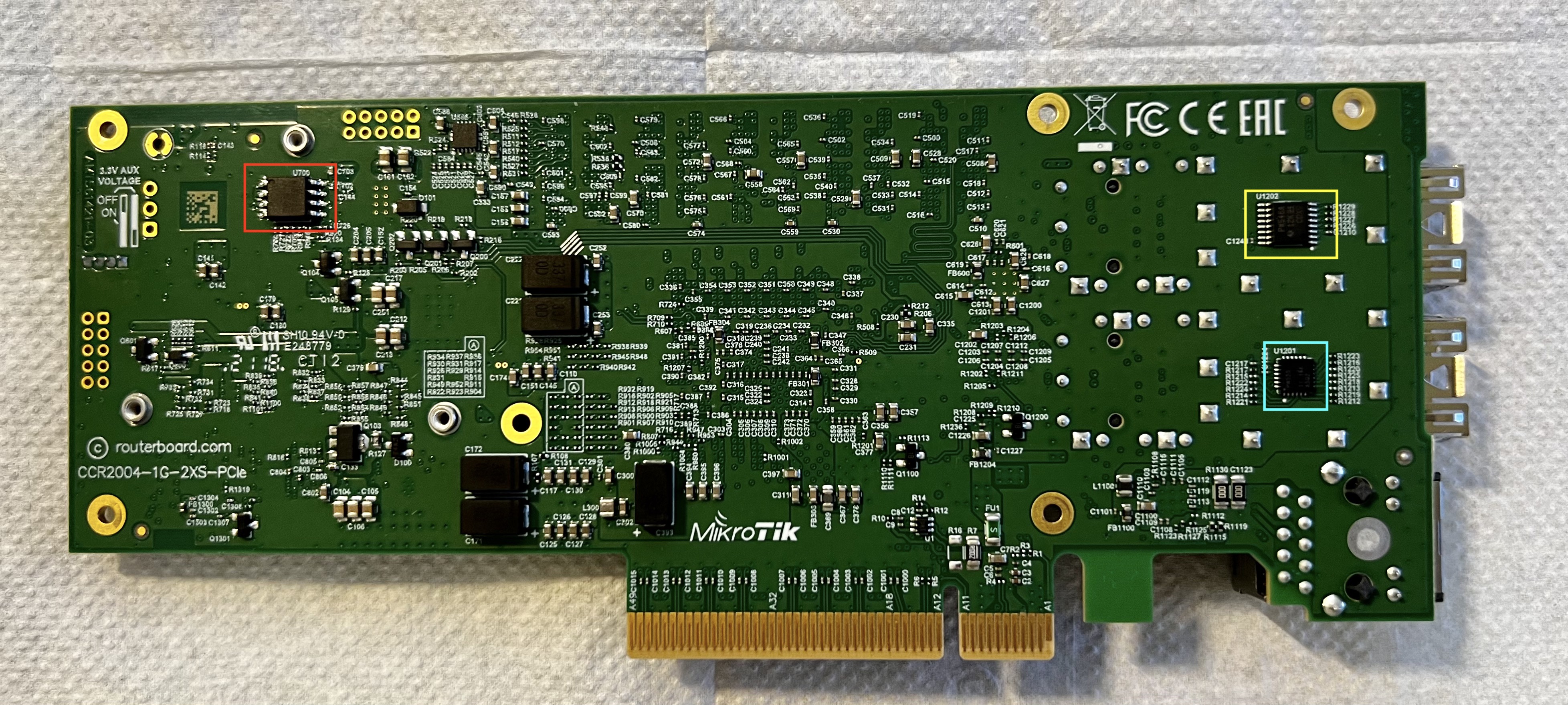
红色:winbond W25Q128JWS,128Mb(16MB) SPI Flash,128M-bit Serial Flash Memory with uniform 4KB sectors and Dual/Quad SPI
黄色:德州仪器TI TCA9546A(丝印PW546A),具有复位功能的低压 4 通道 I2C 和系统管理总线 (SMbus) 开关
蓝色:德州仪器TI TCA9555 (丝印PW555),具有中断、弱上拉和配置寄存器的 16 位 1.65V 至 5.5V I2C/SMBus I/O 扩展器